Smart Coat Rack
Project Duration
7 days
Techniques
Bluetooth communication, servo meter & color sensor.
Concept
Do you know the problem when you come home and want to put your jacket on the coat rack, but there is no more room so you need to turn the whole rack? I have made a prototype that could be a solution for this problem. This prototype will rotate until a free place for your jacket is right in front of you.
End Product
Design Challenges
Vertical Rotation
How Do I create vertical rotation?
For my first design, I thought it would be smart to only rotate the head of the coat rack, instead the whole coat rack. It would require less power, less rotation force, less electronics and no wireless communication, because every component would be at the top of the coat rack.
After some Research, I found out that it would be a bit of a challenge and I didn’t have much time. So I wondered what should I do?
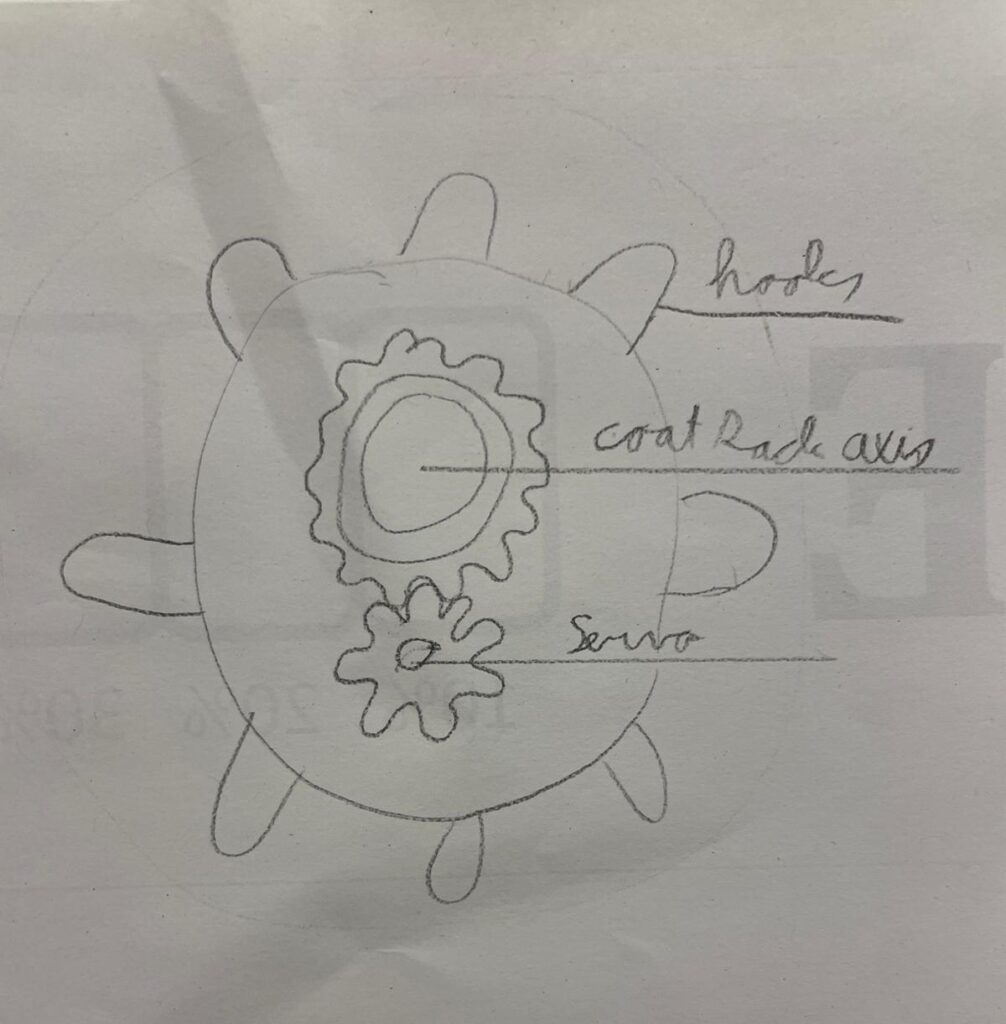
Then I looked up to my previous project “Road Racer”, there I also have rotation but than horizontally. Then it just struck me, why not just rotate the whole case? Now in, instead of using the axis to measure rotation, I use it backwards by applying force to the gear on the axis. Now it’s creating rotating.
Which object to Rotate?
Now that I know I will rotate “The whole coat rack”, which object do I choose to rotate for my prototype? It had to be light in weight, big enough to rotate without losing balance and also strong enough to hold a pair of socks?
I chose my dear old carafe with water. For some reason, this object had all the requirements
Making it Smart
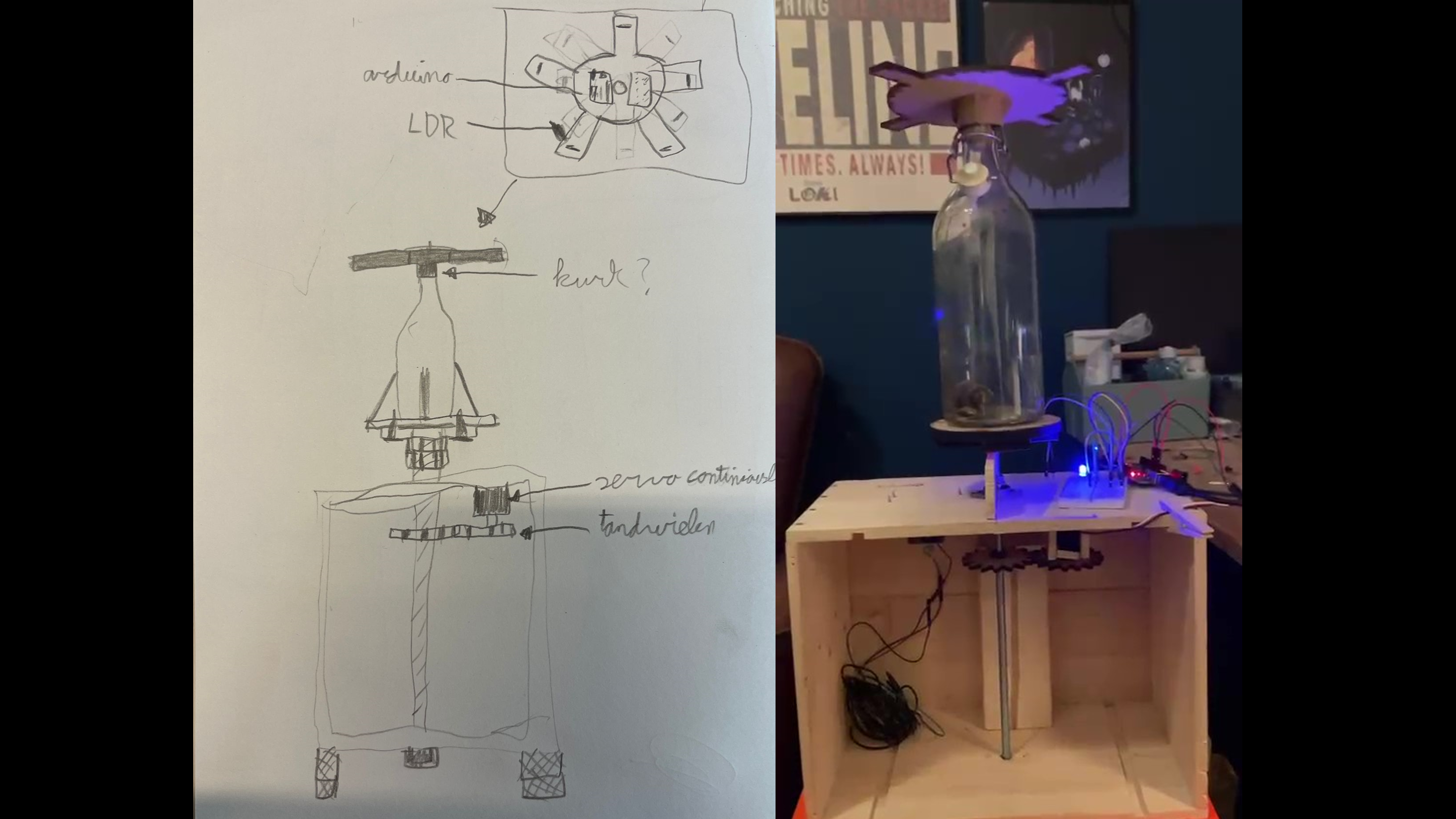
At this point we have a problem, that is because the rotating object and the none rotating object both need to be controlled by a microcontroller, the servo motor needs to know when to stop and move accordingly to a free hook. But how does the arduino know which hook is free, what the position is of the hook in the current context(if it is facing to the user) and how we communicate the data without having a large cable wrapping around the coat rack.
How does the Arduino know which hook is free?
For this question I used LDR’s(Light depended Resistor) as a sensor to decide if the hook is free. I chose this sensor because if a jacket is on a hook, it would cover up the sensor and no light will be measured. That is how it knows which hook is free.
How does the servo motor know when to stop and move
for this I used a color sensor. I cut out a few shapes from different colored papers and glued it underneath the wooden plateu. each color is linked with a LDR, so when a certain LDR is free the servo stops until it sees that color.
How do the Arduino’s communicate with each other?
For this question I chose to use the Bluetooth module HC-05